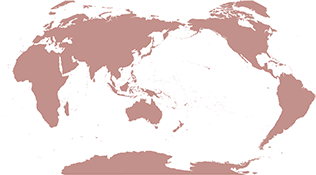


首届机器人全产业链接会上展出的灵巧手。记者 毛思倩 摄

图为第137届广交会服务机器人专区,一台机械臂正在展示灵巧手功能。 记者 邓华 摄
随着人形机器人不断进化,灵巧手作为人机交互的关键接口,其产业重要性进一步提升。近期,资本纷纷布局、技术不断进步,应用场景不断扩围,灵巧手行业迎来快速增长。业界认为,未来灵巧手市场增长潜力巨大,但要实现大规模商业化,仍需面临技术瓶颈、成本压力、供应链依赖、人才短缺、伦理问题等多重挑战。
资本加注加快商业化进程
近期,多家灵巧手企业获得资本加注。日前,专注脑机接口与机器人的傲意科技完成近亿元B++轮融资。本轮融资由英飞尼迪资本、浙江省国有资本运营有限公司旗下浙江省发展资产经营有限公司、沃美达资本共同投资。本轮募集资金将用于加速灵巧手技术领域的研发投入、推动新产品上市进程,以及产能建设和市场拓展等。
此前,专注于研发“灵巧手+云端智脑”的具身智能平台灵心巧手已于4月上旬完成超亿元种子轮融资,创下灵巧手行业最大种子轮融资纪录。本轮融资由红杉种子基金、万凯新材领投,力合资本、力合金融、华仓资本、鞍羽跟投。
紧接着,灵巧手企业因时机器人也于4月底宣布,已完成近亿元B3轮投资。本轮融资由神骐资本领投,源禾资本、华盖资本跟投。
在资本的助力下,灵巧手的技术发展正沿着高度仿生、精密操作和环境适应的方向快速演进,技术不断突围,商业化进程也在加速。
可完成高精度装配、精密分拣及复杂检测,用于辅助手术、康复训练及仿生假肢控制,可执行排爆、救援、太空作业等高危任务……“灵巧手作为人形机器人及工业机器人的核心执行部件,因其高度的灵活性和精确性,被应用于工业制造、医疗健康、生活服务、特种场景与科研以及艺术创作和教育等多个领域,进一步拓展了人机协作的边界。”浙江灵巧智能科技有限公司CEO周晨在接受《经济参考报》记者采访时称。
“灵巧手在技术上不断取得突破,主流产品自由度(机器人手部的关节数量和运动方向的数量)从6个提升至12个至22个。驱动传动方面,空心杯电机驱动成为主流,传动方案也多采用更加精巧的腱绳传动+行星滚柱丝杠的组合。在感知智能化上,触觉及多模态传感器发展逐渐成熟,且在AI大模型赋能下能力得到了大幅提升。”周晨介绍说。
记者注意到,4月16日,戴盟机器人发布的多维触觉感知五指灵巧手DM-Hand1,具有丰富的自由度,结合力位混合控制算法和毫米级厚度的视触觉传感器,能够完成自适应抓握力控制、易碎易损件柔顺操控、精密零部件装配等高难度任务。
4月1日,宇树科技发布的Unitree Dex5灵巧手演示视频显示,该款产品采用单手20个自由度设计(16个主动+4个被动),支持反向驱动与精准力控,并配备94个灵敏触点,能完成“打扑克”“拧魔方”“翻书”等高度拟人化操作。
“灵巧手是人形机器人操作性能的核心,决定机器人功能的上限。”东吴证券在研报中称,未来两年,各主机厂和零部件厂的灵巧手方案会快速迭代,并投入使用场景中,将加速人形机器人的手脑协同训练。
产业链布局加速
2025年被业内认为是人形机器人量产元年,“灵巧手是人形机器人的重要硬件模块,呈现集成化、多自由度的发展趋势,或随人形机器人产业的落地打开百亿市场。”方正证券预测。
国金证券也在研报中表示,从上游资本开支提升、硬件降本,中游技术力提升到下游的实用性提升,机器人行业的生态逐步形成良性循环,有望持续带来新的市场催化,而机器人灵巧手的价值量占比有望超30%。
随着国内灵巧手产业生态加速形成,多家上市公司开始积极布局。
集设计、研发、制造于一体的微型驱动系统方案解决商兆威机电,基于精密减速箱、高性能电机和电控系统的产品组合,结合自身的技术优势、产品特点,聚焦手指等运动执行应用部位,开发了仿生机器人灵巧手产品。
中国电机铁芯模具重点骨干企业震裕科技,研发生产的线性执行器、反向式行星滚柱丝杠及灵巧手精密零部件等产品已成功开拓国内外多家头部机器人本体客户,部分产品实现小批量交付。
恒辉安防也已在机器人灵巧手腿绳材料方面积极布局,且公司与多家在机器人领域具有领先地位和创新实力的公司进行了深度对接。
智能控制方案提供商拓邦股份表示,公司目前应用于灵巧手的产品及解决方案主要为空心杯电机以及空心杯电机本体+减速箱+编码器+丝杠一体的执行器组件。
隆盛科技与无锡市产研院共建了无锡市首家企业主导类新型研发机构,通过自主研发、资源整合等方式,构建了人形机器人从灵巧手硬件技术到抓取模型等软件技术的布局,并针对公司产线场景应用,开发了具有大负载、触觉电子皮肤的灵巧手。
大规模商用仍面临多重挑战
业界认为,灵巧手行业正处于“技术突破期”向“规模化应用期”过渡的关键阶段,需通过技术创新、成本优化和生态协同,解决当前瓶颈,释放其在智能制造、医疗康复等领域的潜力。
“灵巧手商业化仍处于早期阶段,发展还面临多重挑战,包括高昂的成本、技术路线不统一、传感器与力控技术的瓶颈、应用场景适配性有限、供应链与量产能力不足、市场接受度较低以及竞争格局与专利壁垒。未来,需要通过降本增效、标准化设计、软硬件协同优化和跨行业合作来突破这些障碍,推动灵巧手在医疗、物流、制造业等领域的规模化应用。”周晨表示。
在清华大学交叉信息研究院助理教授、星海图联合创始人许华哲看来,灵巧手商业化仍然面临设计复杂度高、本体稳定性低,以及自由度高带来的控制方法复杂等挑战。他认为,“灵巧手未来将会从海量数据中进行学习,充分利用机器手以及人手的所有数据,并且通过强化学习进一步优化,最终可以实现灵巧操作。”
“从算法角度来看,可以通过高保真仿真器,在虚拟环境中反复试错,优化控制策略;利用人手与物体交互的海量视频数据,借助迁移学习等技术将人类的操作经验迁移到灵巧手上,从而让灵巧手更加灵敏,促进人形机器人加速商业化。”清华智能产业研究院助理教授赵昊表示。
虽然看好灵巧手的市场前景,但方正证券也提到,需谨防人形机器人终端应用落地不及预期、人形机器人核心部件降本进程不及预期、机器人大小脑训练进程不及预期等风险。(记者 李保金)



半月谈教育App

官方微信


